


服务热线
86-132-17430013


| 品牌 | 其他品牌 |
|---|
西门子代理商 韶关西门子代理商 韶关西门子代理商
在中国,西门子中国研究院的一个团队正在探索实现未来工业环境中人机交互的基本功能。这项工作的关键环节之一是开发“数据手套”以捕捉和传递人手的运动、手势和压力,从而向机器人描述复杂的指令和展示安全处理各种物体的方法。
自1952年首次亮相以来,工业机器人一直给人以庞大、沉重、静止、对人类构成危险,且只能执行预先设定的重复性任务的印象。尽管这些描述基本符合事实,但微电子、传感器、联网和算法等技术的不断发展,为半自主机器人新纪元的到来做好了准备。
此外,产品的复杂度与日俱增,人们对个性化解决方案的需求也日益增长。这两个看似矛盾的趋势互相融合,推动了重大变革的发生。由此,以轻型工业机器人为特征的灵活生产概念成为了新的关注焦点。轻型工业机器人可以经济、轻松地完成重新部署。较为重要的是,它们能够安全地与人类并肩工作。随着这些新特性的不断发展,它们将为德国“工业4.0”概念中所展望的短周期、小批量生产打开大门,同时也为自主助手的出现打下基础。
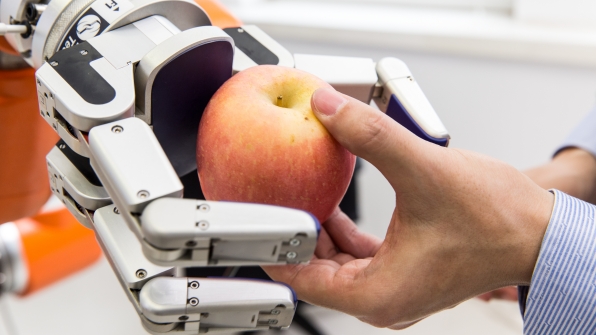
在进行特定任务的训练时,机械臂必须知道应该对物体施加多大压力,以确保准确抓取并实现移动序列。
用手套“交谈”
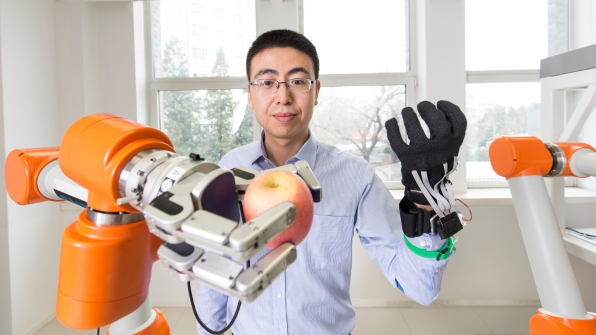
现在,西门子正沿着这个方向,开展广泛深入的研发工作。例如,在中国,一组西门子中国研究院的研究人员正在探索用于实现未来工业环境中人机交互的基本功能。乍看起来,自然语言处理或许是促进交互的技术,因为它不仅高效,而且已经发展成熟。由苹果公司开发的Siri就使用了自然语言处理技术。然而,在嘈杂的工厂环境中,它却并非理想之选。因此,西门子中国研究院的研究人员正在开发数据手套,以捕捉人手的运动和手势,从而向机器人描述复杂的指令。
目前,一只原型数据手套已在测试阶段。它装配了17个带有惯性传感器和磁性传感器的微电子机械系统。通过整合来自传感器的输入,手套的手势(包括每只手指的运动)将被合并传送到“受训”的机械臂与机械手处,以实时执行特定任务。随着这项技术的发展,机器学习将被用来训练机器人,教它们识别以手势表达的越来越复杂的指令,向机器人分配高级任务,以及教会机器人新的技能。
机械臂与机械手在进行任务训练时必须学会对各类物体施加不同的压力,这样才能优化抓取和移动的动作。在这方面,数据手套*。例如,西门子的原型手套配有作用力反馈功能,这就在人手与机器人之间形成了交互闭环。数据手套的指尖装有由微控制器驱动的压电陶瓷元件。当抓握特定物体时,手套可以产生对应准确压力值的不同频率和振幅的振动。一旦接收到这些数据,机械手就可以根据自身压力传感器返回的实时反馈,向物体施加适当压力。
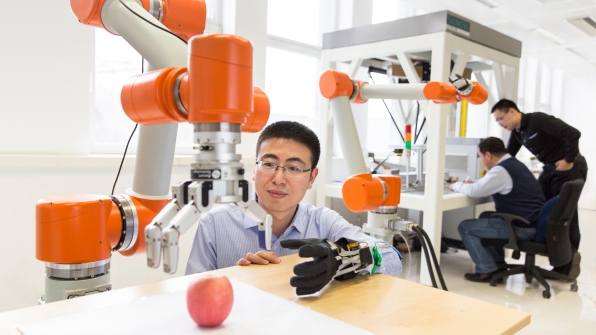
在博士的带领下,西门子中国研究院的研究人员正在开发数据手套。
数据手套可以捕捉人手的运动和手势,向机器人传递复杂指令。
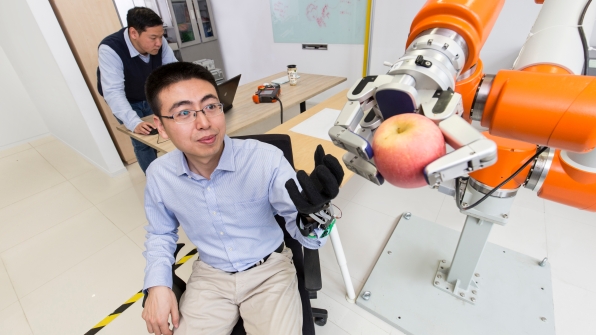
当数据手套的用户执行手部动作时,传感器将实时记录输入并将数据转发至受训机械臂。
请将扳手递给我
在高度灵活的未来生产环境中,机器人将无暇参加长期培训。同人类工人一样,它们要现学现用。作为朝这个方向迈出的*步,西门子中国研究院的研究人员已经开发出了一套算法,让机器人能够执行一项非常重要的基础任务:抓取未知物体。这项任务虽然对人类而言轻而易举,但对于机器人却挑战性,因为机器人必须自主决定正确的抓取手势和与目标物体的接触点。有趣的是,这项任务的解决方案是以Xbox游戏机所用微软设备Kinect为基础开发出来的。
Kinect可以同时捕捉图像中的深度数据和红绿蓝(RGB)数据。前者用于确定抓取手势,而后者则用于计算抓取点。根据这个数据组合,机器人可以将目标物体与周围图像分离,并把它代入基于极限学习算法的模型。这个过程将顺序生成一组抓取点。前文中已经提到,在抓取物体时,机器人需要注意施加的作用力水平。一方面,作用力应当足够大以确保抓牢;另一方面,作用力也应当足够小,以免损坏物体。目前,工程师可以预先设定作用力水平,并通过安装在机器人抓取装置上的压力传感器来完成监测。然而,这种情况也将改变,因为一套自适应的作用力控制机制已在研发当中。
安全*
如果机器人助手真的能与人类并肩工作,那么安全将是一项重要的课题。为此,西门子中国研究院的研究人员正在研发基于阻抗控制理论的全新控制机制,它可以同时控制机械臂的位置和作用力。只要人类工人明确规定作用力的最大值,这种机器人就能够推算出运动,从而在保持高准确度的情况下成为安全的自主助手。目前,研究人员正在研发阻抗控制型末端执行器来检验可能的模型和算法。这种模型和算法将控制机器人在动作过程中对物体施加的作用力。例如,末端执行器的一个可能的应用便是以恒定作用力水平打磨器件。
阻抗控制技术还可以应用在机器人编程中。传统的机器人编程不仅专业性很强,而且费时、昂贵。工程师要接受专业培训,并进行大量实践练习。但阻抗控制型机器人助手可以在培训领域开启一片新天地。在这种培训中,仅通过示范,机器人就可以同时完成学习与编程。这些示范动作可以被分解为不同的拖、放过程,机械臂通过一系列“教学点”学习特定的位置和手势。如此,机器人助手就能学会整个程序并可精确重复。对于快速变动的命令与需求,这种模式将成为一种简单而灵活的解决方案。